Constraint Statisfaction Problems
A constraint satisfaction problem is defined mathematically as a set of variables, a set of domains for each variable, and a set of constraints that limit which values in each domain are a valid assignment for each variable.
Constraint Satisfaction Problems (CSP) can be framed as a Triple <X, D, C> :
Xis a set of variables,{X1, …, Xn}.Dis a set of domains,{D1, ..., Dn}, one for each variable.Cis a set of constraints that specify allowable combinations of values.
Notes:
- Each domain
D_iconsists of a set of allowable values,{v1,...,vk}for variableX_i. - Each constraint
C_iconsists of a pair⟨scope, rel ⟩, wherescopeis a tuple of variables that participate in the constraint andrelis a relation that defines the values that those variables can take on. - For example, if
X_1andX_2both have the domain{A,B}, then the constraint saying the two variables must have different values can be written as⟨(X_1, X_2), [(A, B), (B, A)]⟩ or as ⟨(_X1, X_2), X_1 ≠ X_2⟩.
Sudoku CSP Definition
- Variables: the 81 boxes that must be assigned a value
- Domains: every variable has the same domain, the single digits 1-9
- Constraints: each row, column, and 3x3 group must contain one of each digits 1-9
4-Queens CSP Definition
The 4-queens problem asks you to place 4 chess queens on a 4x4 grid such that none of the queens are in "check" (i.e., no two queens occupy the same row, column, or diagonal). The problem can be expanded to standard 8x8 chessboards as the "8-queens" problem, or generalized to any NxN grid as the "N-queens" problem.
- Variables: the row assignment of each of the 4 queens (the variables represent the queen assigned to each of the four columns)
- Domains: every variable has the same domain, the single digits 1-4
- Constraints: No pair of queens can be on the same row or diagonal
Map Coloring CSP Definition
Map coloring is a problem that asks for an assignment of distinct colors to each region of the map. While it seems like a trivial problem, map coloring is an intuitive way to describe more complex equivalent problems relevant in other parts of computer science. Problem statement: color each region either orange, green, or blue in such a way that no neighboring regions have the same color.
- Variables: One for each region of the map (in this case WA, NT, SA, Q, NSW, V, and T)
X = {WA,NT,Q,NSW,V,SA,T} - Domains: All variables have the same domain, the list of colors that may be assigned to each region
D_i = {red , green , blue} - Constraints: No pair of adjacent regions can have the same color
C = {SA≠WA, SA≠NT, SA≠Q, SA≠NSW, SA≠V, WA≠NT,NT≠Q, Q≠NSW, NSW≠V}
Variations on CSP formalism
- unary constraint: restricts the value of a single variable. For example, in the map-coloring problem we can assign Western Australia region with blue color using this representation: ⟨(SA),SA=blue⟩.
- binary constraint: relates two variables. For example, no neighboring region can have the same color can be represented as ⟨(X1, X2), X1≠X2⟩.
- AIMA textbook chapter 3 section 6.1.2 and 6.1.3 cover different kind of variable and constraint variations on CSP.
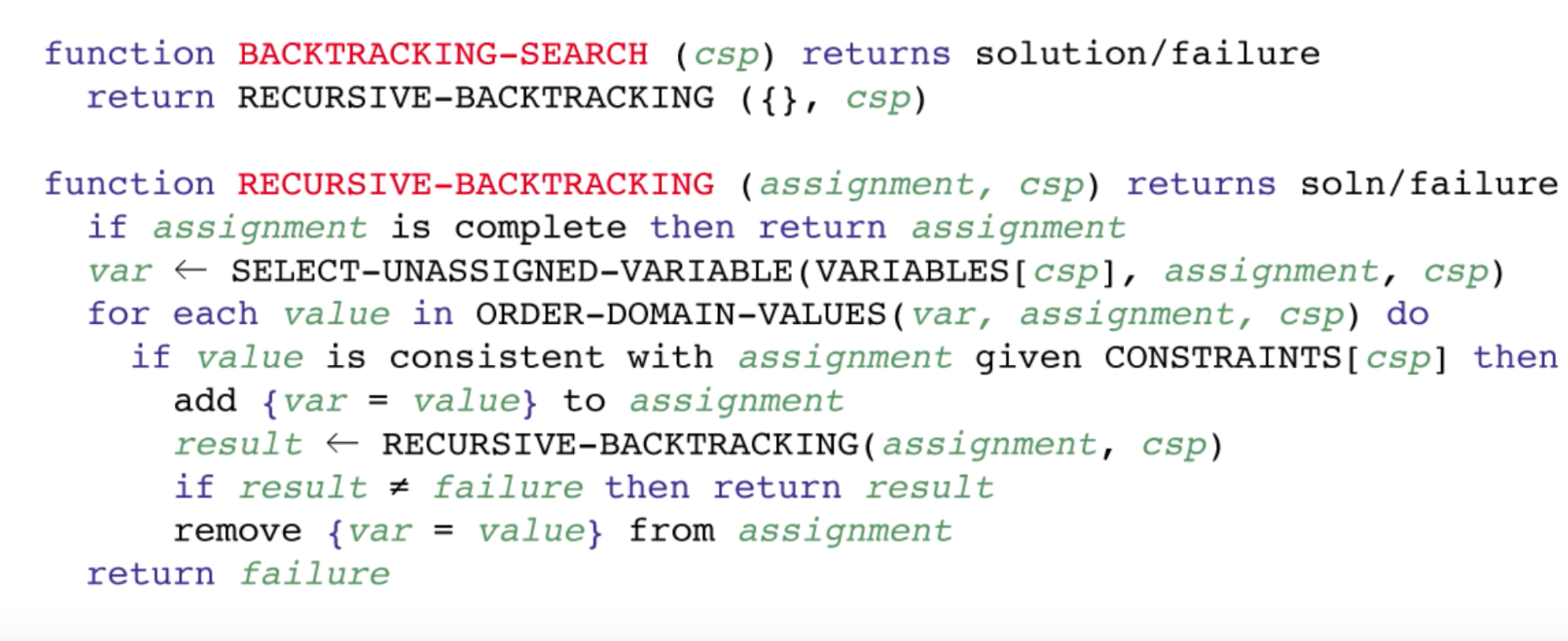
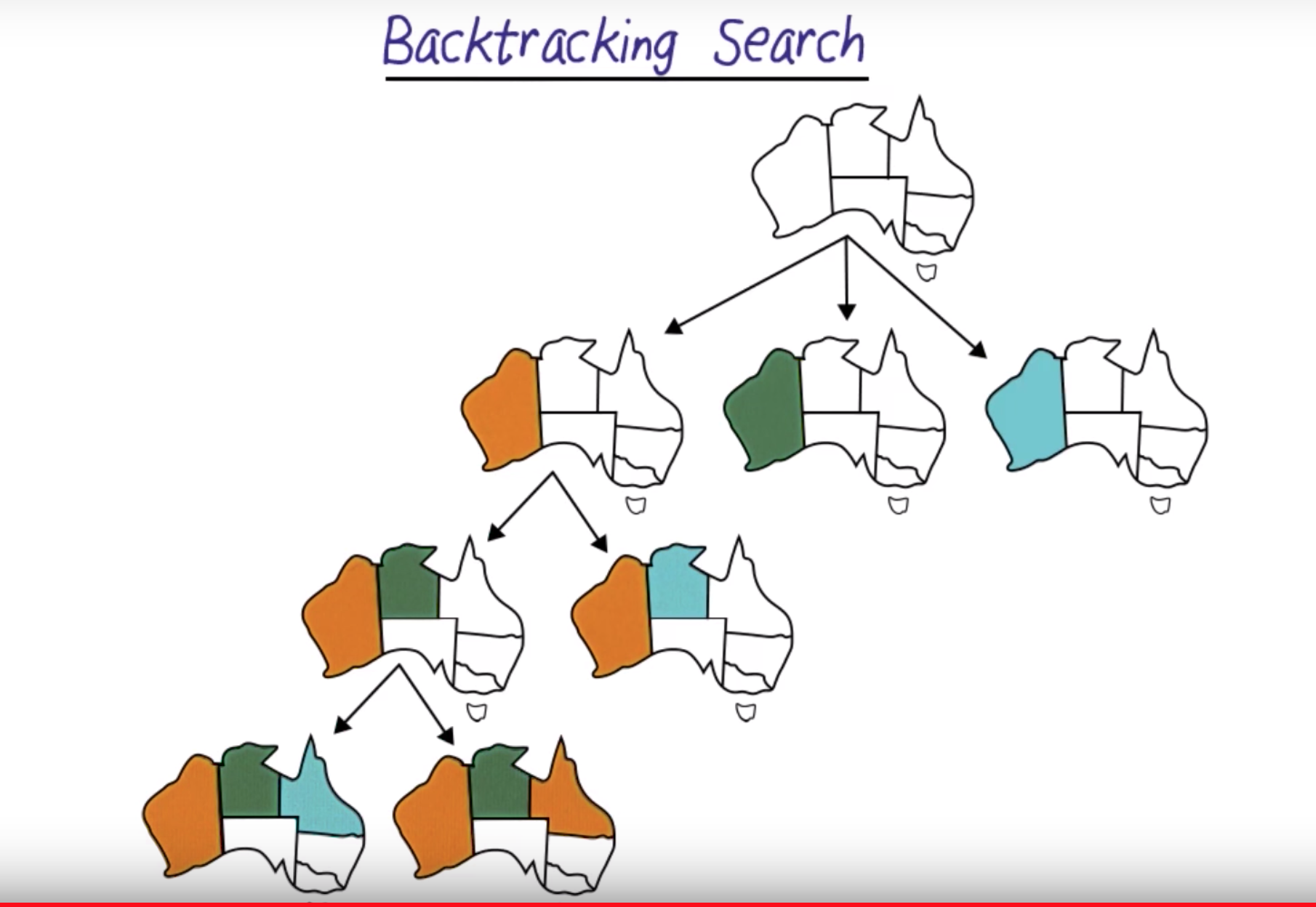
Backtracking Search
Backtracking is a general algorithm for finding all (or some) solutions to some computational problems, notably constraint satisfaction problems, that incrementally builds candidates to the solutions, and abandons a candidate ("backtracks") as soon as it determines that the candidate cannot possibly be completed to a valid solution.(Wikipedia)
Why backtracking?
The basic idea of searching for a solution in a CSP is that you guess assignments var = value in order to advance to the next state until every variable is assigned to a valid value. If we used a standard depth first search, then for n variables each with d possible values the branching factor of the resulting tree would be nd at the top level, (n-1)d at the second level, (n-2)d at the next level, and so on. The total branching factor would be n! d^n when there are only d^n possible assignments.
While depth first search is very exhaustive search, backtracking tries to removes some of the redundancies of the depth first search. Backtracking is identical to depth first search order, but it only evaluates a single assignment order for the variables and it reverts an assignments whenever the current state is inconsistent with any of the problem constraints. Backtracking will typically find a solution= faster than depth first search.
One key feature of backtracking search is that the choice of which variable to assign first and the choice of which value to assign can have a big impact on the efficiency of the search.
Improving backtracking efficiency
- Least constraining value: choose the variable that rules out the fewest values in the remaining variables.
- Minimum remaining values (MRV): choose the variable with the fewest legal values.
- Degree heuristic: choose the variable with the most constraints on remaining variables.
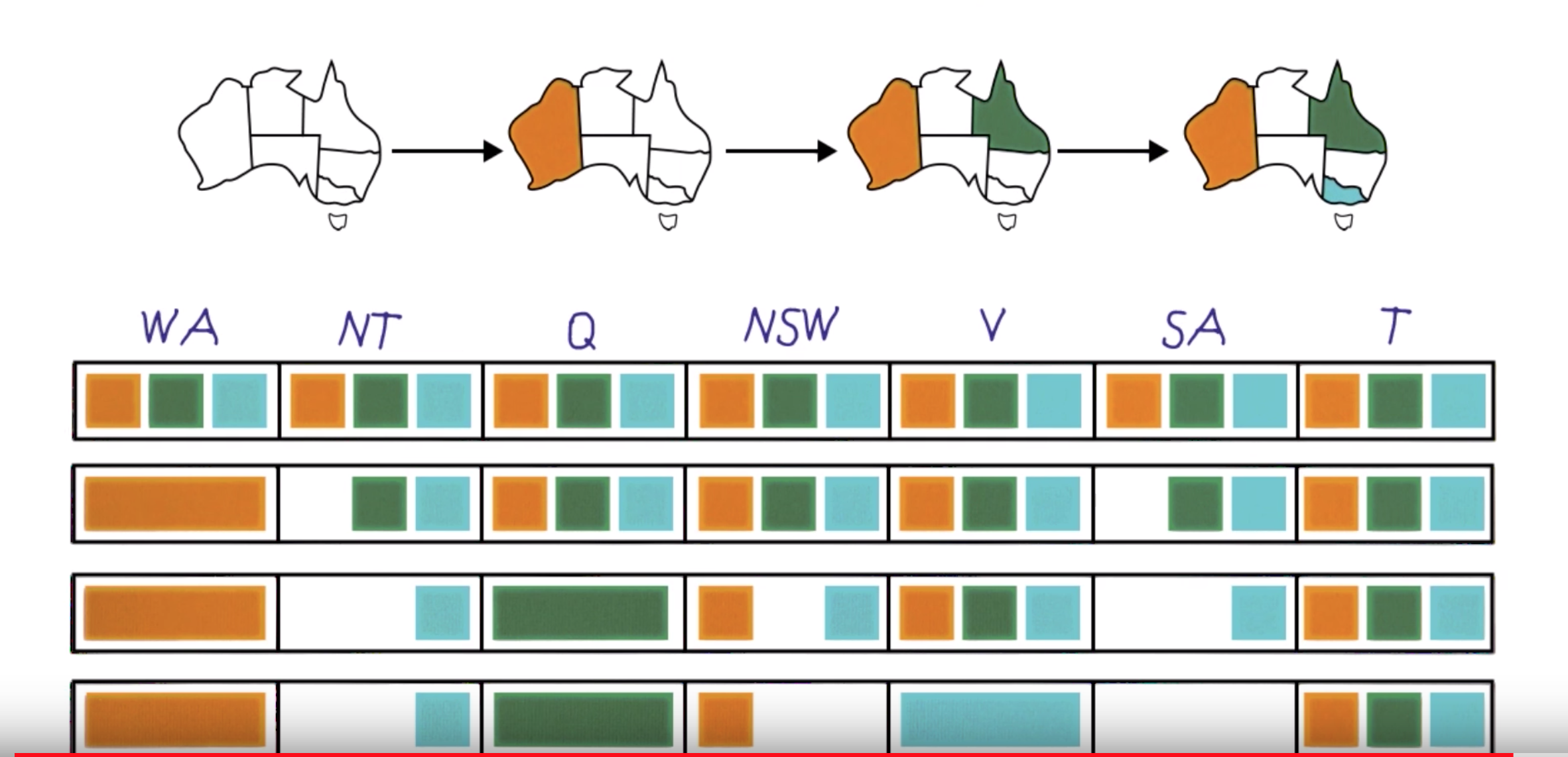
Forward checking
In backtracking algorithms, look ahead is the generic term for a subprocedure that attempts to foresee the effects of choosing a branching variable to evaluate one of its values. The two main aims of look-ahead are to choose a variable to evaluate next and the order of values to assign to it.
In a general constraint satisfaction problem, every variable can take a value in a domain. A backtracking algorithm therefore iteratively chooses a variable and tests each of its possible values; for each value the algorithm is recursively run. Look ahead is used to check the effects of choosing a given variable to evaluate or to decide the order of values to give to it. The simpler technique for evaluating the effect of a specific assignment to a variable is called forward checking. Given the current partial solution and a candidate assignment to evaluate, it checks whether another variable can take a consistent value. In other words, it first extends the current partial solution with the tentative value for the considered variable; it then considers every other variable {\displaystyle x_{k}} x_{k} that is still unassigned, and checks whether there exists an evaluation of {\displaystyle x_{k}} x_{k} that is consistent with the extended partial solution. More generally, forward checking determines the values for {\displaystyle x_{k}} x_{k} that are consistent with the extended assignment.
For example, in the map coloring problem below, choosing the colors as follows will end in deadblock, so, we should backtrack and choose a different path.
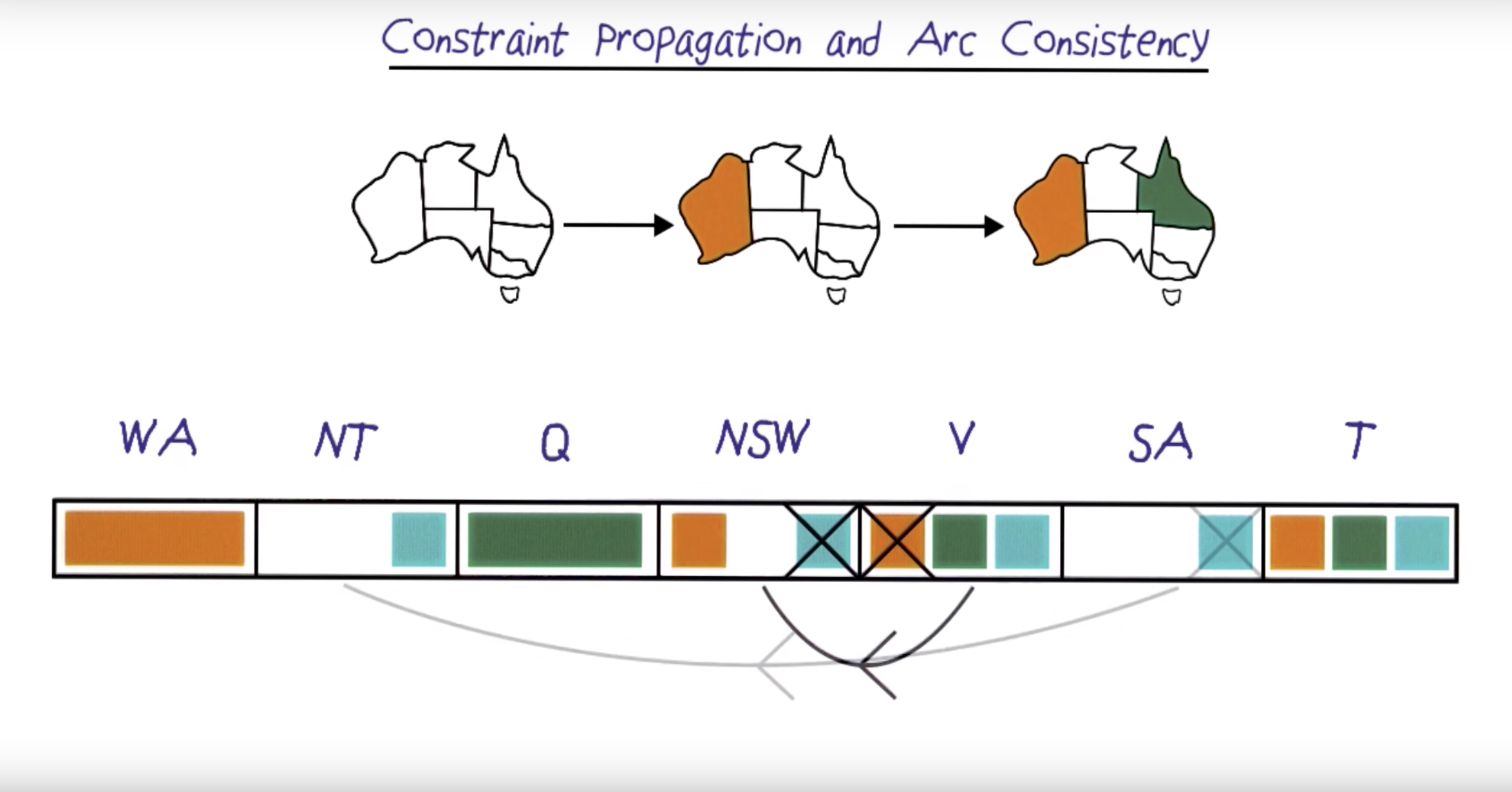
Arc consistency
A look-ahead technique that may be more time-consuming but may produce better results is based on arc consistency. Namely, given a partial solution extended with a value for a new variable, it enforces arc consistency for all unassigned variables. In other words, for any unassigned variables, the values that cannot consistently be extended to another variable are removed. The difference between forward checking and arc consistency is that the former only checks a single unassigned variable at time for consistency, while the second also checks pairs of unassigned variables for mutual consistency.
Example of arc consistency applied to the map coloring problem above:
Structured CSP:
- Tree-structured CSPs: Choose a variable as root, order variables from root to leaves such that every node's parent preceded it in the ordering.
- Conditioning: Instantiate a variable, prune its neighbors' domains.
Practice example:
Constraint satisfaction is a general problem solving technique for solving a class of combinatorial optimization problems by imposing limits on the values in the solution. The goal of this exercise is to practice formulating some classical example problems as CSPs, and then to explore using a powerful open source constraint satisfaction tool called Z3 from Microsoft Research to solve them.
Find the details of the problem in this repo
Additional resources:
Microsoft Research Z3
Google OR Tools
SAT/SMT by Example
Tractability in CSP
Satisfiability Solvers
Non-convex MILP
The Alldifferent Constraint